テキストから組み立て可能な 3D パーツへ
3D CAD 設計は長年エンジニアの領域でした—Fusion 360 や SolidWorks などのツールは学習ハードルが高く、パラメータ調整は面倒で、ギアの噛み合いや公差の適合には繰り返し試行錯誤が必要です。Text-to-CAD オープンソースツールチェーンはこの状況を変えつつあります:自然言語で要件を記述すると、AI が自動的に編集可能なパラメトリック 3D モデルを生成します。
このツールは GitHub で 3 日で 1,000 スターを突破、MIT ライセンス、Claude Code や Codex での直接呼び出しをサポートし、STEP、STL、GLB、DXF、URDF 形式で出力できます。
ツールスタックとワークフロー
コアツールチェーンは以下のコンポーネントで構成されます:
- Text-to-CAD エンジン:Python + build123d ベース、自然言語指示をパラメトリック CAD コードに変換
- GPT 5.5 / Codex:推論層として機能、エンジニアリング意図を理解し build123d 実行可能な Python スクリプトを生成
- エクスポートパイプライン:STEP(精密製造)、STL(3D プリント)、URDF(ロボットシミュレーション)、GLB(ビジュアライゼーションプレビュー)をサポート
典型的な完全ワークフロー:
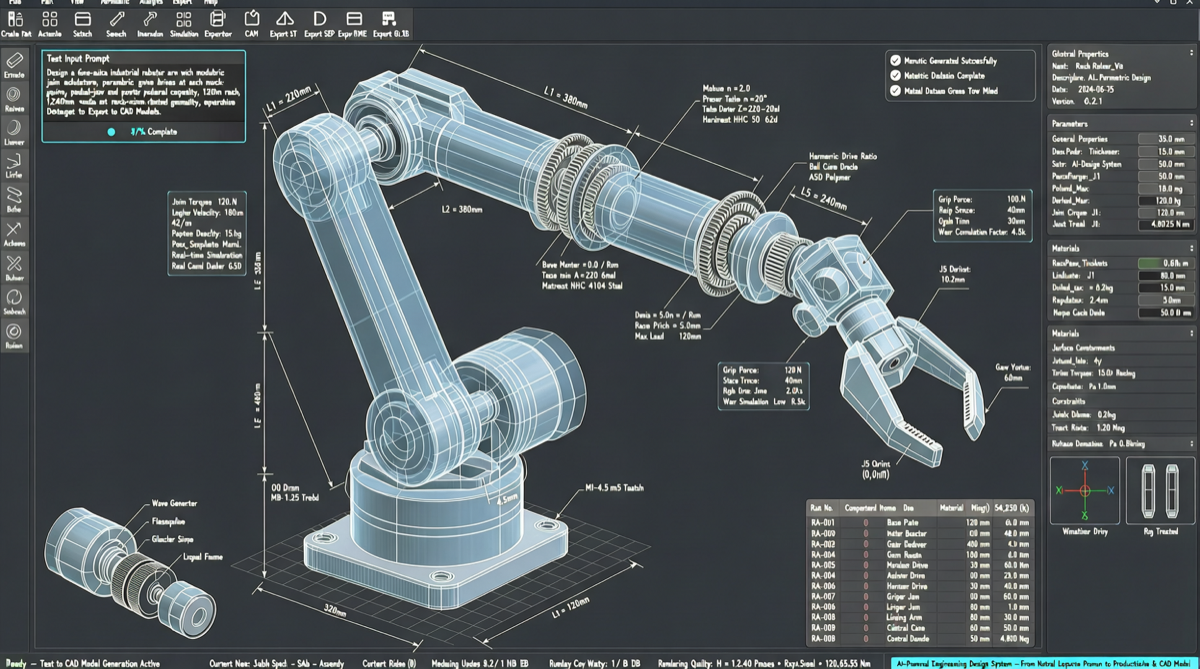
- Claude Code で要件を記述、例「末端に平行グリッパー付きの 7 自由度ロボットアームを設計」
- Text-to-CAD エンジンが各ジョイントの寸法、接続方法、可動範囲を定義する build123d Python スクリプトを生成
- スクリプト実行後、STEP アセンブリファイルと URDF 運動学モデルを出力
- URDF は ROS シミュレーションで運動学的正確性を直接検証可能
- STEP ファイルは 3D プリントまたは CNC 加工へ
実際のテストでは、ある開発者がこのワークフローで Codex 内で完全な 7 軸ロボットアームの URDF モデルを完成させました—機能運動学とカスタム GUI を含む—従来のツールチェーンでは 6 つ以上のソフトウェアを組み合わせ、数週間かかった作業です。
代替案との比較
| 次元 | Fusion 360 / SolidWorks | Text-to-CAD |
|---|---|---|
| 入力方法 | 手動モデリング | 自然言語記述 |
| 学習カーブ | 数ヶ月 | 数分で習得 |
| モデル精度 | 工業グレード | パラメトリックグレード、検証が必要 |
| 編集可能性 | ネイティブ編集 | プロンプトを修正して再生成 |
| ロボットシミュレーション | 追加プラグインが必要 | ネイティブ URDF 出力 |
| コスト | サブスクリプション $500+/年 | 無料オープンソース |
クイックスタート
# 1. 依存関係をインストール
pip install build123d
# 2. Claude Code または Codex で Text-to-CAD を有効化
# プロジェクトディレクトリを開き、設計要件を記述
# 3. プロンプト例
# 「モジュール 2、歯数 20 と 40 の噛み合いギアを設計、
# 中心間距離 60mm、STEP ファイルを出力」
# 4. 生成された Python スクリプトを実行
python generated_cad.py
# 出力: gears.step, gears.stlコストと適用境界
適している場合:
- ロボットプロトタイプの高速イテレーション
- 3D プリント部品のパラメトリック設計
- 教育および小規模製造シナリオ
- 寸法の頻繁な調整が必要な設計タスク
制限:
- 複雑な曲面(自動車ボディ、民生用電子機器筐体など)の能力は限定的
- 生成されたモデルは工学検証(応力解析、公差検査)が必要
- 厳格な GD&T 注釈が必要な工業生産図面には不向き
- エコシステムは初期段階、コミュニティチュートリアルとベストプラクティスは限られている
Text-to-CAD は専門 CAD エンジニアのツールに取って代わるものではありませんが、3D 設計の技術的ハードルを大幅に下げ、開発者が数分で機械コンセプトを検証できるようにします。