从文本到可装配的 3D 零件
3D CAD 设计长期是工程师的专属领域——Fusion 360、SolidWorks 等工具的学习门槛高,参数调整繁琐,齿轮咬合、公差配合需要反复试算。Text-to-CAD 开源工具链正在改变这一点:用自然语言描述需求,AI 自动生成可编辑的参数化 3D 模型。
该工具在 GitHub 上线 3 天突破 1000 星,MIT 协议,支持在 Claude Code 或 Codex 中直接调用,输出 STEP、STL、GLB、DXF 和 URDF 格式。
工具栈与工作流程
核心工具链包含以下组件:
- Text-to-CAD 引擎:基于 Python + build123d,将自然语言指令转化为参数化 CAD 代码
- GPT 5.5 / Codex:作为推理层,理解工程意图并生成 build123d 可执行的 Python 脚本
- 导出管线:支持 STEP(精密制造)、STL(3D 打印)、URDF(机器人仿真)、GLB(可视化预览)
一个典型的完整工作流:
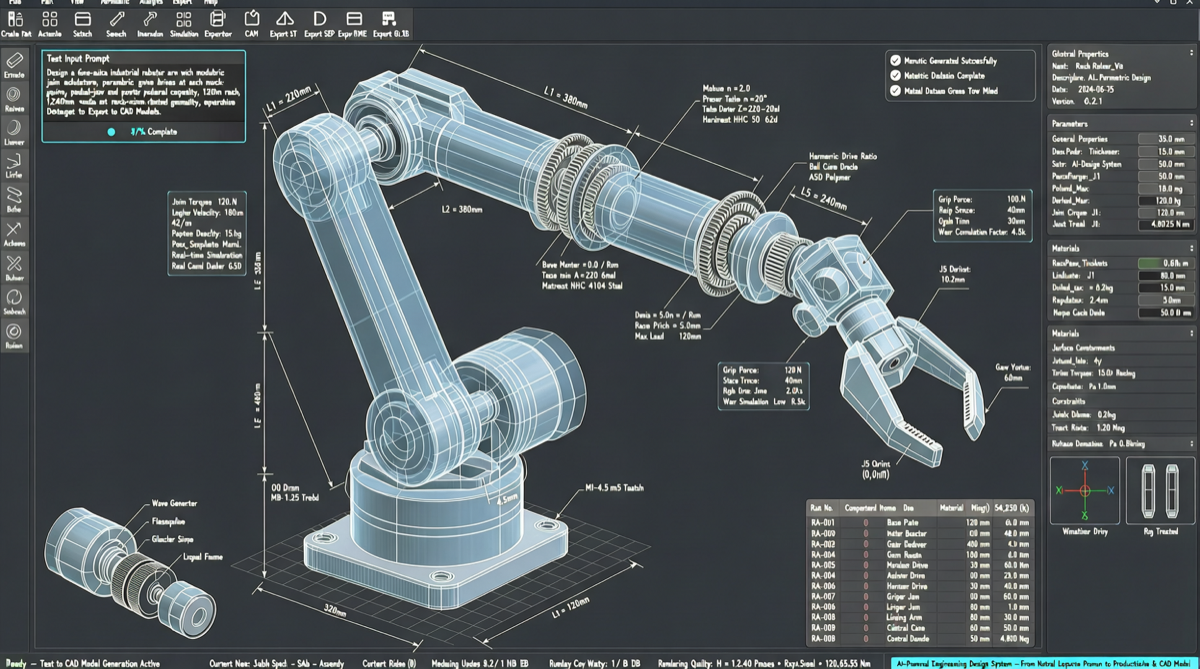
- 在 Claude Code 中描述需求,例如”设计一个 7 自由度机械臂,末端带平行夹爪”
- Text-to-CAD 引擎生成 build123d Python 脚本,定义各关节尺寸、连接方式和运动范围
- 脚本运行后输出 STEP 装配文件和 URDF 运动学模型
- URDF 可直接用于 ROS 仿真验证运动学正确性
- STEP 文件送 3D 打印或 CNC 加工
实际测试中,一位开发者用此流程在 Codex 中完成了完整 7 轴机械臂的 URDF 建模,包含功能运动学和自定义 GUI——过去用传统工具链需要拼接 6+ 个软件、耗时数周。
与替代方案对比
| 维度 | Fusion 360 / SolidWorks | Text-to-CAD |
|---|---|---|
| 输入方式 | 手动建模 | 自然语言描述 |
| 学习曲线 | 数月 | 分钟级上手 |
| 模型精度 | 工业级 | 参数化级,需验证 |
| 可编辑性 | 原生编辑 | 修改 prompt 重新生成 |
| 机器人仿真 | 需额外插件 | 原生 URDF 输出 |
| 成本 | 订阅费 $500+/年 | 免费开源 |
快速上手
# 1. 安装依赖
pip install build123d
# 2. 在 Claude Code 或 Codex 中启用 Text-to-CAD
# 打开项目目录,描述你的设计需求
# 3. 示例 prompt
# "设计一组咬合齿轮,模数 2,齿数分别为 20 和 40,
# 中心距 60mm,输出 STEP 文件"
# 4. 运行生成的 Python 脚本
python generated_cad.py
# 输出: gears.step, gears.stl成本与适用边界
适合:
- 机器人原型快速迭代
- 3D 打印零件的参数化设计
- 教学和小规模制造场景
- 需要频繁调整尺寸的设计任务
限制:
- 复杂曲面(如汽车车身、消费电子产品外壳)能力有限
- 生成的模型需要通过工程验证(应力分析、公差检查)
- 不适合需要严格 GD&T 标注的工业生产图纸
- 目前生态仍在早期,社区教程和最佳实践较少
Text-to-CAD 不会取代专业 CAD 工程师的工具,但它显著降低了 3D 设计的技术门槛,让开发者能在几分钟内验证机械概念。